
Einführungsszenarien für kooperatives, vernetztes Fahren
IFORESEE - INTRODUCTORY CONCEPTS FOR CONNECTED AND COOPERATIVE CARS
Während „autonomes“ automatisches Fahren bereits als Teil einer absehbaren Zukunft gilt, ist die Perspektive für „vernetztes“ beziehungsweise „kooperatives“ automatisches Fahren deutlich ungewisser: „Vernetzte“ Funktionen setzen auf das Vorhandensein anderer vernetzter Fahrzeuge und während für Durchsetzungsquoten ab 50 % Anteil kooperativer Fahrzeuge im Verkehr bereits große Vorteile durch Kooperation und Vernetzung zwischen den Fahrzeugen aufgezeigt werden konnten, ist absehbar, dass allein in Deutschland etwa 10 Jahre geschätzt werden müssen, bis solche Quoten ab Markteinführung erreicht sind. Es ist bislang unklar, wie bis dahin bereits ein systematischer Mehrwert durch kooperative Funktionen erzeugt werden kann, der ihre zunehmende Verbreitung überhaupt ermöglicht.
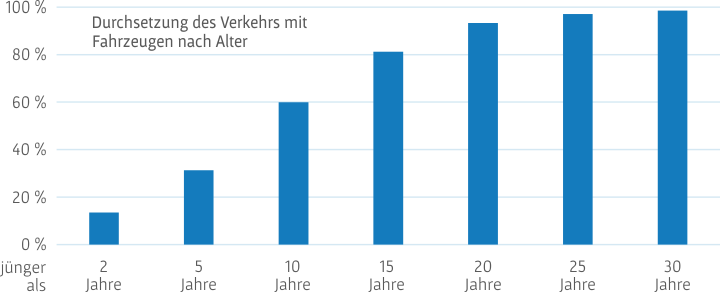
Bei aktuellen Durchsetzungsquoten müsste eine neue vernetzte Fahrfunktion, optimistisch abgeschätzt, zwei Jahre mit weniger als 20% Kooperationspartnern arbeiten können, und fünf Jahre mit weniger als 40%. Viele, gerade neue Fahrzeuge wechseln in dieser Zeit bereits ihre Besitzer. Daten: Kraftfahrtbundesamt (KBA)
Vor diesem Hintergrund setzt sich das Teilprojekt „iFORESEE“ zum Ziel, nachzuweisen, dass kooperatives und vernetztes Fahren eine marktnahe Technologie ist, die bereits mit geringen Durchsetzungsquoten und niedrigen Automatisierungsgraden (VDA/SAE-Stufen 1 bis 3) einen Marktwert darstellt und für spätere Fahrzeuggenerationen eine evolutionär wachsende Durchsetzung an vernetzten Fahrzeugen sicherstellt.
Im Projekt werden sowohl neue technische Lösungen entwickelt (Manöverplanung, Mensch-Maschine-Kommunikation, Kommunikationstechnik), als auch die Einflüsse auf Nutzerakzeptanz, Verkehrsfluss, sowie auf Gesellschaft und Markt untersucht.
Die im Projekt entwickelten automatisierten Systeme sollen insbesondere auch mit geringen Durchsetzungsquoten (ab etwa 10 %) unter realistischen Bedingungen und mit seriennaher Technik einen Mehrwert erzeugen. Gleichzeitig müssen die Systeme eine Aufwärtskompatibilität gewährleisten, die es ihnen ermöglicht, symbiotisch mit späteren Fahrzeuggenerationen höherer Automatisierungs- und Kooperationsgrade existieren zu können.
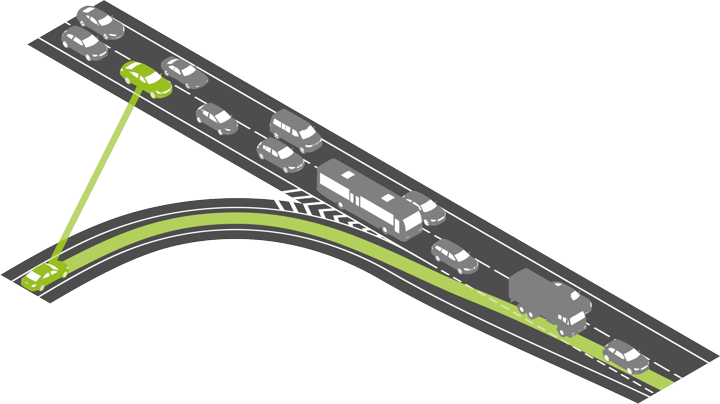
Kooperatives Auffahren auf die Autobahn: Schon bei geringen Durchsetzungsgraden und Automatisierungsstufen können Fahrzeuge einander gezielt einfädeln lassen. Herausfordernd ist hier unter anderem eine präzise Synchronisation der beteiligten Fahrzeuge auf dem Weg zur Auffahrt.
Um für diese Lösungen einen Marktwert zu entwickeln und aufzuzeigen, ist ein breiter Ansatz erforderlich, der neben technischer Machbarkeit auch Schwerpunkte auf Datenschutz, Safety und Security, Akzeptanz, Verkehrswesen und vor allem herstellerübergreifende Standardisierung und Wertschöpfung legt. Deshalb verbindet das Projekt die breit aufgestellten Forschungseinrichtungen in und um Karlsruhe mit Vertretern der automatisierten Fahrzeugtechnologien (FZI, KIT-MRT und Fraunhofer IOSB), der Kommunikationstechnologie (KIT-IHE), der Verkehrsforschung (KIT-IfV), sowie der Akzeptanz-, Gesellschafts- und Marktanalyse (KIT-ifab und Fraunhofer ISI) und setzt auf eine enge Abstimmung mit Industrie und öffentlichen Stellen.
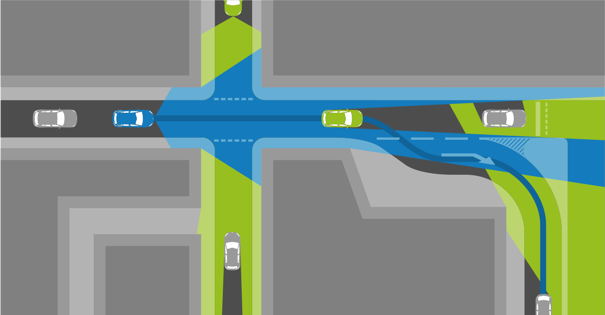
Gemeinsame Nutzung von Sensorinformationen für den „Blick um die Ecke" als weitere Beispiel für Kooperation
Zur Erprobung und Validierung der entwickelten Fahrfunktionen nutzt das Projekt die Möglichkeiten des „Testfelds Autonomes Fahren Baden-Württemberg“ für Versuchsfahrten mit Testfahrzeugen im realen Stadt- und Überland-Verkehr, sowie die Zusammenarbeit mit dem Partnerprojekt „Virtuelles Testfeld“ der Profilregion Mobilitätssysteme Karlsruhe für simulative Studien und Safety/Security-Analysen.

Erprobung im Fahrsimulator
Den Projektflyer als PDF zum Download finden Sie hier